

Return to MODULE PAGE
Parts of a Robot
Jeremy Gottlieb: Author
David Leech Anderson: Author
Robots can be made in suprisingly many ways, using all manor of materials. But most robots share a great deal in common. Below you will find descriptions of the most common elements that are used in constructing robots.
I. Sensors
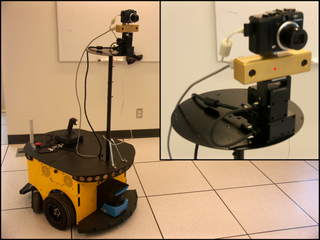 Sensors are what allow a robot to gather information about its environment. This information can be used to guide the robot's behavior. Some sensors are relatively familiar pieces of equipment. Cameras allow a robot to construct a visual representation of its environment. This allows the robot to judge attributes of the environment that can only be determined by vision, such as shape and color, as well as aid in determining other important qualities, such as the size and distance of objects.
Sensors are what allow a robot to gather information about its environment. This information can be used to guide the robot's behavior. Some sensors are relatively familiar pieces of equipment. Cameras allow a robot to construct a visual representation of its environment. This allows the robot to judge attributes of the environment that can only be determined by vision, such as shape and color, as well as aid in determining other important qualities, such as the size and distance of objects.
 Microphones allow robots to detect sounds. Sensors such as buttons embedded in bumpers can allow the robot to determine when it has collided with an object or a wall. Some robots come equipped with thermometers and barometers to sense temperature and pressure.
Microphones allow robots to detect sounds. Sensors such as buttons embedded in bumpers can allow the robot to determine when it has collided with an object or a wall. Some robots come equipped with thermometers and barometers to sense temperature and pressure.
Other types of sensors are more complex, and give a robot more interesting capabilities.Robots equipped with LIght Detection And Ranging (LIDAR) sensors use lasers to construct three dimensional maps of their surroundings as they navigate through the world. Supersonic sensors are a cheaper way to accomplish a similar goal only using high frequency sound instead of lasers. Finally, some robots are equipped with specialized sensors such as accelerometers and magnetometers that allow the robot to sense its movement with respect to the Earth's gravity and magnetic field.
II. Effectors
The effectors are the parts of the robot that actually do the work. Effectors can be any sort of tool that you can mount on your robot and control with the robot's computer. Most of the time, the effectors are specific to the tasks that you want your robot to do. For example, in addition to some of the very common effectors listed below, the Mars rovers have tools like hammers, shovels, and a mass spectrometer to use in analyzing the soil of Mars. Obviously a mail-delivering robot would not need any of those.
End-Effectors are the tools at the end of robotic arms and other robotic appendiges that directly interact with objects in the world. A "gripper" at the end of a robotic arm is a common end-effector.  Others include spikes, lights, hammers,and screw-drivers. Medical robots have their own specialized effectors, such as tools for cutting in surgery and suturing incisions.
Others include spikes, lights, hammers,and screw-drivers. Medical robots have their own specialized effectors, such as tools for cutting in surgery and suturing incisions.
Motors can be used for many of the moving parts of a robot, from joints on robotic limbs to wheels on robotic vehicles, to the flaps and propellors on a robotic airplane. Pneumatics and hydraulics are another way of moving parts of the robot, particularly where the robot needs a lot of strength to perform a particular task.
Speakers can allow certain robots to talk to us or generate other sounds. Speech is, after all, a behavior intended to modify the environment, usually by conveying some sort of information to the people around us.
III. Control Systems (the "brains")
A robot's "control system" is that part of the robot that determines the robot's behavior.
A. Pre-Programmed Robots
The very simplest pre-programmed robot merely repeats the same operations over and over. Such a robot is either insensitive to changes in its environment or it can detect on very limited information about very limited parts of the environment. Such a robot will require little in the way of "controls" but it will perform properly only if the environment behaves in accord with the robot's pre-programmed actions.
B. Autonomous Robots
More complex robots are able to respond appropriately in environments that are much more complicated. Such a robot will have sensory apparatus that allow it to detect changing features of the environment and a range of behaviors that will allow it to respond to those changes. Whatever features of the robot enable it to adapt its behavior to its environment we will call the "control system."
There are many different kinds of control systems used in robots. In this module, we will focus most of our attention on robots that have one of two different kinds of control systems (sometimes called "robotic architectures"):
Top-Down: Build the brain first! Then hook up the sensors and the effectors. If the brain is built properly, it will take the input data from the sensors and be "smart enough" to behave intelligently in response to it. You build a brain, by writing an artificial intelligence (AI) computer program. There are two main kinds of AI programs: Classical AI & Connectionist Networks. We will explore them both in this module.
Bottom-Up: Don't bother with a brain! Hook each sensor directly to an effector -- call this a "behavior." . Then rank each of the behaviors (the sensor-effector pairs) in order of priority, to determine which one "wins out" and controls the robot if more than one is activated. Call this ranking a "hierarchy." Most hierarchies produce stupid robots; but just the right hierarchy can produce remarkably "intelligent" behavior. (These are also called "behavior-based" robots.)
We believe that the best way to understand how robots work, is to build them yourself. So, in addition to more traditional materials that teach about robots, you will also find several "Virtual" robotics labs -- in which you will build and/or program both kinds of robots.
Before you begin your robot training, you might want to pause for a moment and consider the fact that we have already begun talking about "intelligent" robots. What exactly do we mean by that? If a machine can take information about the world as input, and produce effective behavior as output -- is that enough for "intelligence"? Even a thermostat and a pocket calculator might meet that rquirement. Are they genuinely intelligent?
What is "intelligence" and should we believe that it can be built into a machine? To begin exploring this question, why not play a game with an AI program called "Larry Learner" -- see if you can beat it, and decide for yourself whether a machine can think." [This activity is on two webpages. Follow the link at the bottom of the first page, to get to the second page.]
(NOTE: You may skip this section if you are not interested in the topic. If you have an instructor, of course, skip only if it is not required.)

